A Review of Mobile Robots: Applications and Future Prospect

Approximately eight decades ago, during World War II, the concept of intelligent robots capable of independent arm movement began to emerge as computer science and electronics merged with advancements in mechanical engineering. This marked the starting point of a thriving industry focused on research and development in mobile robotics. In recent years, there has been a growing association between robotics and artificial intelligence, aiming to enable robots to make autonomous decisions akin to human cognition. To achieve this objective, researchers are actively exploring the integration of artificial neural networks with mechatronic robots. These intelligent and self-decision-making robots possess the potential to revolutionize human capabilities and elevate our intelligence to unprecedented levels. In various physical service sectors such as cleaning, security, and other tasks that don't require creative or analytical thinking, these robots can efficiently carry out the assigned responsibilities. Moreover, robots have the potential to play a significant role in military operations, eliminating the need for human lives to be sacrificed in warfare. This review article aims to explore the advancements in mobile robotics since their inception nearly 80 years ago. It will delve into the detailed applications of these robots across different sectors and discuss their profound effects on contemporary human lives and industrial landscapes.
This is a preview of subscription content, log in via an institution to check access.
Access this article
Subscribe and save
Springer+ Basic
€32.70 /Month
- Get 10 units per month
- Download Article/Chapter or eBook
- 1 Unit = 1 Article or 1 Chapter
- Cancel anytime
Buy Now
Price includes VAT (France)
Instant access to the full article PDF.
Rent this article via DeepDyve

Similar content being viewed by others

Improving performance of robots using human-inspired approaches: a survey
Article 21 November 2022

Review of Research on the Key Technologies, Application Fields and Development Trends of Intelligent Robots
Chapter © 2018

Perspectives on Technological Developments Applied to Robotics
Chapter © 2014
Explore related subjects
- Artificial Intelligence
- Medical Ethics
References
- Britannica. (2014). The editors of encyclopaedia. “R.U.R..” Encyclopaedia Britannica. Available online: https://www.britannica.com/topic/RUR. Accessed 17 June 2022
- Mennie, D. (1974). Systems and cybernetics: Tools of the discipline are progressing from the inspirational to the practical. IEEE Spectrum,11, 85. ArticleGoogle Scholar
- Considine, D. M., & Considine, G. D. (1986). Robot technology fundamentals. Chapman and Hall advanced industrial technology seriesIn D. M. Considine & G. D. Considine (Eds.), Standard handbook of industrial automation (pp. 262–320). Springer. ChapterGoogle Scholar
- Nitzan, D. (1985). Development of intelligent robots: Achievements and issues. IEEE Journal on Robotics and Automation,1, 3–13. ArticleGoogle Scholar
- Oommen, B., Iyengar, S., Rao, N., & Kashyap, R. (1987). Robot navigation in unknown terrains using learned visibility graphs. Part I: The disjoint convex obstacle case. IEEE Journal on Robotics and Automation,3, 672–681. ArticleGoogle Scholar
- Daily Mail Reporter. (2010). Built to last: Robot made from crashed bomber comes back to life after 45 years stored in his inventor’s garage. Available online: https://www.dailymail.co.uk/sciencetech/article-1331949/George-foot-robot-comes-life-45-years-stored-inventors-garage. Accessed 17 January 2022
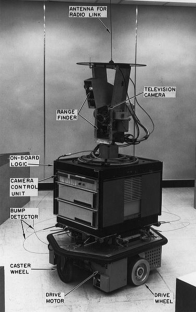
- History Computer Staff. (2022). Shakey the robot explained: Everything you need to know. Available online: https://historycomputer.com/shakey-the-robot. Accessed 11 May 2022
- https://historyofinformation.com/image.php?id=1048
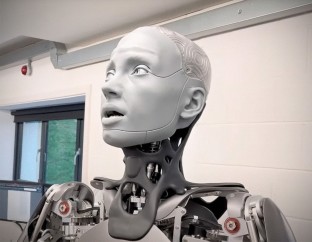
- British Broad Casting (BBC). (2022). CES 2022: The humanoid robot, AMECA, revealed at CES show. Available online: https://www.bbc.co.uk/newsround/59909789. Accessed 19 January 2022
- https://media.techeblog.com/images/engineered-arts-ameca-humanoid-robot-ai-platform.jpg
- Ohya, I., Kosaka, A., & Kak, A. (1998). Vision-based navigation by a mobile robot with obstacle avoidance using single-camera vision and ultrasonic sensing. IEEE Transactions on Robotics and Automation,14, 969–978. ArticleGoogle Scholar
- Burman, S. (2016). Intelligent mobile robotics. Technology focus—A bimonthly S&T magazine of DRDO, pp. 2–16.
- Moigne, J. J. L., & Waxman, A. M. (1988). Structured light patterns for robot mobility. IEEE Journal on Robotics and Automation,4, 541–548. ArticleGoogle Scholar
- Alatise, M. B., & Hancke, G. P. (2020). A review on challenges of autonomous mobile robot and sensor fusion methods. IEEE Access,8, 39830–39846. ArticleGoogle Scholar
- Piñero-Fuentes, E., Canas-Moreno, S., Rios-Navarro, A., Delbruck, T., & Linares-Barranco, A. (2021). Autonomous driving of a rover-like robot using neuromorphic computing. In I. Rojas, G. Joya, & A. Català (Eds.), Advances in computational intelligence, IWANN 2021, lecture notes in computer science. (Vol. 12862). Springer. Google Scholar
- https://www.twitter.com/BostonDynamics
- Arleo, A., Millan, J. D. R., & Floreano, D. (1999). Efficient learning of variable-resolution cognitive maps for autonomous indoor navigation. IEEE Transactions on Robotics and Automation,15, 990–1000. ArticleGoogle Scholar
- Betke, M., & Gurvits, L. (1997). Mobile robot localization using landmark. IEEE Transactions on Robotics and Automation,13, 251–263. ArticleGoogle Scholar
- Dissanayake, M. W. M. G., Newman, P., Clark, S., Durrant-Whyte, H. F., & Csorba, M. (2001). A solution to the simultaneous localization and map building (SLAM) problem. IEEE Transactions on Robotics and Automation,17, 229–241. ArticleGoogle Scholar
- Kavraki, L. E., Svestka, P., Latombe, J. C., & Overmars, M. H. (1996). Probabilistic roadmaps for path planning in high-dimensional configuration spaces. IEEE Transactions on Robotics and Automation,12, 566–580. ArticleGoogle Scholar
- Jensfelt, P., & Kristensen, S. (2001). Active global localization for a mobile robot using multiple hypothesis tracking. IEEE Transactions on Robotics and Automation,17, 748–760. ArticleGoogle Scholar
- Paden, B., Čáp, M., Yong, S. Z., Yershov, D., & Frazzoli, E. (2016). a survey of motion planning and control techniques for self-driving urban vehicles. IEEE Transactions on Intelligent Vehicles,1, 33–55. ArticleGoogle Scholar
- Huang, S., Teo, R. S. H., & Tan, K. K. (2019). Collision avoidance of multi unmanned aerial vehicles: A review. Annual Reviews in Control,48, 147–164. ArticleMathSciNetGoogle Scholar
- Claussmann, L., Revilloud, M., Gruyer, D., & Glaser, S. (2020). A review of motion planning for highway autonomous driving. IEEE Transactions on Intelligent Transportation Systems,21, 1826–1848. ArticleGoogle Scholar
- Floreano, D., Godjevac, J., Martinoli, A., Mondada, F., & Nicoud, J. D. (1999). Design, control, and applications of autonomous mobile robots. International series on microprocessor-based and intelligent systems engineeringIn S. G. Tzafestas (Ed.), Advances in intelligent autonomous systems (Vol. 18, pp. 159–186). Springer. ChapterGoogle Scholar
- Arkin, R. C. (1990). The impact of cybernetics on the design of a mobile robot system: A case study. IEEE Transactions on Systems, Man, and Cybernetics,20, 1245–1257. ArticleGoogle Scholar
- Borenstein, J., & Koren, Y. (1989). Real-time obstacle avoidance for fast mobile robots. IEEE Transactions on Systems, Man, and Cybernetics,19, 1179–1187. ArticleGoogle Scholar
- Hayes-Roth, B. (1995). An architecture for adaptive intelligent systems. Artificial Intelligence,72, 329–365. ArticleGoogle Scholar
- Miyata, R., Fukuda, O., Yamaguchi, N., & Okumura, H. (2021). Object search using edge-AI based mobile robot. In Proceedings of the 6th international conference on intelligent informatics and biomedical sciences (ICIIBMS), Oita, Japan, 25–27 November 2021 (pp. 198–203).
- Moreno, J., Clotet, E., Lupiañez, R., Tresanchez, M., Martínez, D., Pallejà, T., Casanovas, J., & Palacín, J. (2016). Design, implementation and validation of the three-wheel holonomic motion system of the assistant personal robot (APR). Sensors,16, 1658. ArticleGoogle Scholar
- Fiedeń, M., & Bałchanowski, J. (2021). A mobile robot with omnidirectional tracks—Design and experimental research. Applied Sciences,11, 11778. ArticleGoogle Scholar
- Klančar, G., Zdešar, A., Blažič, S., & Škrjanc, I. (2017). Chapter 3—Control of wheeled mobile systems. In G. Klančar, A. Zdešar, S. Blažič, & I. Škrjanc (Eds.), Wheeled mobile robotics, Butterworth-Heinemann (pp. 61–159). Elsevier. ISBN 9780128042045. ChapterGoogle Scholar
- Saike, J., Shilin, W., Zhongyi, Y., Meina, Z., & Xiaolm, L. (2022). Autonomous navigation system of greenhouse mobile robot based on 3D lidar and 2D lidar SLAM. Frontiers in Plant Science,13, 815218. ArticleGoogle Scholar
- Ghosh, K., Pandey, U., Pathak, A., & Mondal, S. (2023, April). Simulation of density based traffic control system using Proteus 7.1 Professional. In Proceedings of 3rd International Conference on Artificial Intelligence: Advances and Applications: ICAIAA 2022 (pp. 493–504). Singapore: Springer.
- Karur, K., Sharma, N., Dharmatti, C., & Siegel, J. (2021). A survey of path planning algorithms for mobile robots. Vehicles,3, 448–468. ArticleGoogle Scholar
- Thrun, S., Beetz, M., Bennewitz, M., Burgard, W., Cremers, A. B., Dellaert, F., Fox, D., Haehnel, D., Rosenberg, C., Roy, N., Schulte, J., & Schulz, D. (2000). Probabilistic algorithms and the interactive museum tour-guide robot minerva. The International Journal of Robotics Research,9, 972–999. ArticleGoogle Scholar
- Kuffner, J., & LaValle, S. M. (2000). RRT-connect: An efficient approach to single-query path planning. In Proceedings of the IEEE international conference on robotics and automation, San Francisco, CA, USA, 24–28 April 2000 (vol. 2, pp. 995–1001).
- Hawes, N. (2022). The reality of robots in everyday life. University of Birmingham. Available online: https://www.birmingham.ac.uk/research/perspective/reality-of-robots.aspx. Accessed 11 February 2022
- Smids, J., Nyholm, S., & Berkers, H. (2020). Robots in the workplace: A threat to- or opportunity for- meaningful work. Philosophy and Technology,33, 503–522. ArticleGoogle Scholar
- Tai, M. C. T. (2020). The impact of artificial intelligence on human society and bioethics. Tzu Chi Medical Journal,32, 339–343. ArticleGoogle Scholar
- Atkinson, R. D. (2019). Robotics and the future of production and work. Information Technology and Innovation Foundation. Available online: https://itif.org/publications/2019/10/15/robotics-and-future-production-and-work. Accessed 15 February 2022
- Guan, W. H., Melvern, C., Hou, F. T., Zaw, A. M., Khan, M. A., Aramugam, K., & Ramaswamy, M. (2021). D-Bot: A food serving robot during pandemic situation. In 2021 IEEE international conference on robotics, automation, artificial-intelligence and internet-of-things (RAAICON) (pp. 22–25). IEEE.
- Von Alt, C., Allen, B., Austin, T., Forrester, N., Goldsborough, R., Purcell, M., & Stokey, R. (2001). Hunting for mines with REMUS: A high performance, affordable, free swimming underwater robot. In MTS/IEEE Oceans 2001. An ocean odyssey. Conference proceedings (IEEE Cat. No. 01CH37295) (vol. 1, pp. 117–122). IEEE.
- Lalegani Dezaki, M., & Bodaghi, M. (2023). A review of recent manufacturing technologies for sustainable soft actuators. International Journal of Precision Engineering and Manufacturing-Green Technology. https://doi.org/10.1007/s40684-023-00533-4ArticleGoogle Scholar
- Ma, Z., Gao, M., Guo, K., Wang, Q., Li, L., Liu, C., Zhu, G., & Liu, Z. (2023). Analysis and optimization of energy consumption for multi-part printing using selective laser melting and considering the support structure. International Journal of Precision Engineering and Manufacturing-Green Technology,10, 693–707. https://doi.org/10.1007/s40684-022-00450-yArticleGoogle Scholar
- Runji, J. M., Lee, Y. J., & Chu, C. H. (2023). Systematic literature review on augmented reality-based maintenance applications in manufacturing centered on operator needs. International Journal of Precision Engineering and Manufacturing-Green Technology,10, 567–585. https://doi.org/10.1007/s40684-022-00444-wArticleGoogle Scholar
- Ahmed, A. A., Nazzal, M. A., & Darras, B. M. (2022). Cyber-physical systems as an enabler of circular economy to achieve sustainable development goals: A comprehensive review. International Journal of Precision Engineering and Manufacturing-Green Technology,9, 955–975. https://doi.org/10.1007/s40684-021-00398-5ArticleGoogle Scholar
- Ren, Z., Fang, F., Yan, N., & Wu, Y. (2022). State of the art in defect detection based on machine vision. International Journal of Precision Engineering and Manufacturing-Green Technology,9, 661–691. https://doi.org/10.1007/s40684-021-00343-6ArticleGoogle Scholar
- Song, J. H., Min, S. H., Kim, S. G., Cho, Y., & Ahn, S. H. (2022). Multi-functionalization strategies using nanomaterials: A review and case study in sensing applications. International Journal of Precision Engineering and Manufacturing-Green Technology,9, 323–347. https://doi.org/10.1007/s40684-021-00356-1ArticleGoogle Scholar
- Kim, Y. G., Quan, Y. J., Kim, M. S., Cho, Y., & Ahn, S. H. (2021). Lithography-free and Highly angle sensitive structural coloration using Fabry–Perot resonance of tin. International Journal of Precision Engineering and Manufacturing-Green Technology,8, 997–1006. https://doi.org/10.1007/s40684-021-00324-9ArticleGoogle Scholar
- Seo, C., Son, D., Lee, K., Ko, K., Lee, J., & Seo, T. (2023). SPIRA: Screw wheel-based mobile robot for switching primitives. International Journal of Precision Engineering and Manufacturing. https://doi.org/10.1007/s12541-023-00839-yArticleGoogle Scholar
- Kim, K., & Seo, T. (2023). FleTbot, a flexible thermoplastic polyurethane applied tri-spiral spoke wheel robot. International Journal of Precision Engineering and Manufacturing. https://doi.org/10.1007/s12541-023-00830-7ArticleGoogle Scholar
- Shin, J., Kim, Y., Kim, D. Y., Yoon, G. H., & Seo, T. (2023). Parametric design optimization of a tail mechanism based on tri-wheels for curved spoke-based stair-climbing robots. International Journal of Precision Engineering and Manufacturing,24, 1205–1220. https://doi.org/10.1007/s12541-023-00817-4ArticleGoogle Scholar
- Choi, D. K. (2023). Motion tracking of four-wheeled mobile robots in outdoor environments using Bayes’ filters. International Journal of Precision Engineering and Manufacturing,24, 767–786. https://doi.org/10.1007/s12541-023-00777-9ArticleGoogle Scholar
- Yuan, L., Zhao, J., Li, W., & Hou, J. (2023). Improved informed-RRT* based path planning and trajectory optimization for mobile robots. International Journal of Precision Engineering and Manufacturing,24, 435–446. https://doi.org/10.1007/s12541-022-00756-6ArticleGoogle Scholar
- Bae, J., Park, S., Jeon, K., & Choi, J. Y. (2023). Autonomous system of TMR (total mixed ration) feed feeding robot for smart cattle farm. International Journal of Precision Engineering and Manufacturing,24, 423–433. https://doi.org/10.1007/s12541-022-00742-yArticleGoogle Scholar
- Son, D., Shin, J., Kim, Y., & Seo, T. (2022). LEVO: Mobile robotic platform using wheel-mode switching primitives. International Journal of Precision Engineering and Manufacturing,23, 1291–1300. https://doi.org/10.1007/s12541-022-00696-1ArticleGoogle Scholar
- Park, J., An, B., Kwon, O., Yi, H., & Kim, C. (2022). User intention based intuitive mobile platform control: Application to a patient transfer robot. International Journal of Precision Engineering and Manufacturing,23, 653–666. https://doi.org/10.1007/s12541-022-00656-9ArticleGoogle Scholar
- Tran, D. T., Truong, H. V. A., & Ahn, K. K. (2021). Adaptive nonsingular fast terminal sliding mode control of robotic manipulator based neural network approach. International Journal of Precision Engineering and Manufacturing,22, 417–429. https://doi.org/10.1007/s12541-020-00427-4ArticleGoogle Scholar
Author information
Authors and Affiliations
- Independent Researcher, Dehradun, 248007, Uttarakhand, India Nitin Sharma
- University of Petroleum and Energy Studies, Dehradun, 248007, Uttarakhand, India Jitendra Kumar Pandey & Surajit Mondal
- Electrical Cluster, University of Petroleum and Energy Studies, Dehradun, 248007, Uttarakhand, India Surajit Mondal
- Nitin Sharma
